Apoderus.net
ティティの秘密基地
リザード
MINDSTORMSスパイダーの改良版?脚を4本に減らし、RISに付属しているモーターに変更し、パワーをあげました。

RCXがあまりに重いので、脚をあげることが出来ません。電池をなんとかしたいですね。
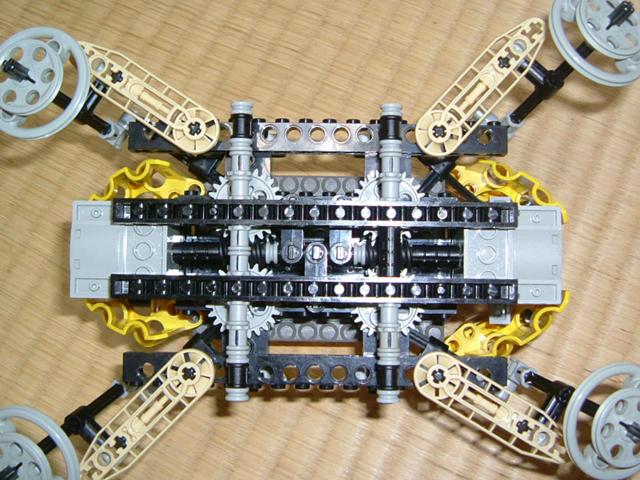
裏側。ギアをこのように配置するのは意外と大変なのです。モーターは2つ。パワーとバランスを考えています。

脚の部分。シャフトでリンクされているので、さらに重いものを担がせると、損壊してしまうでしょう...。

脚の部分を強調。